static void MX_CAN2_Init(void);
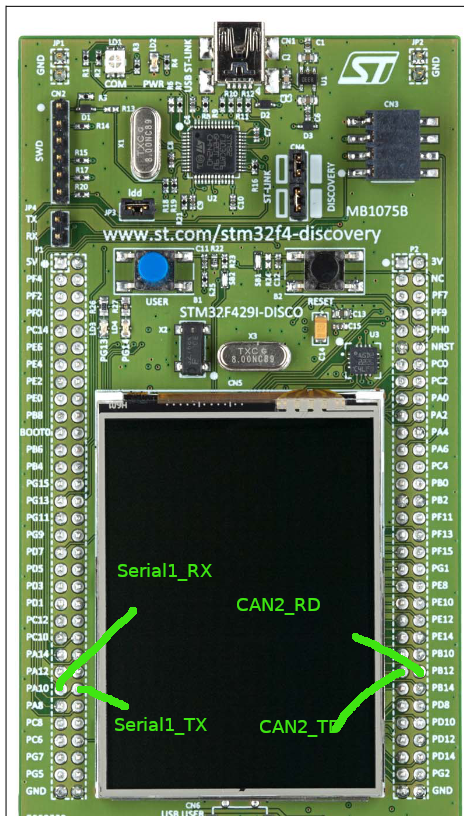
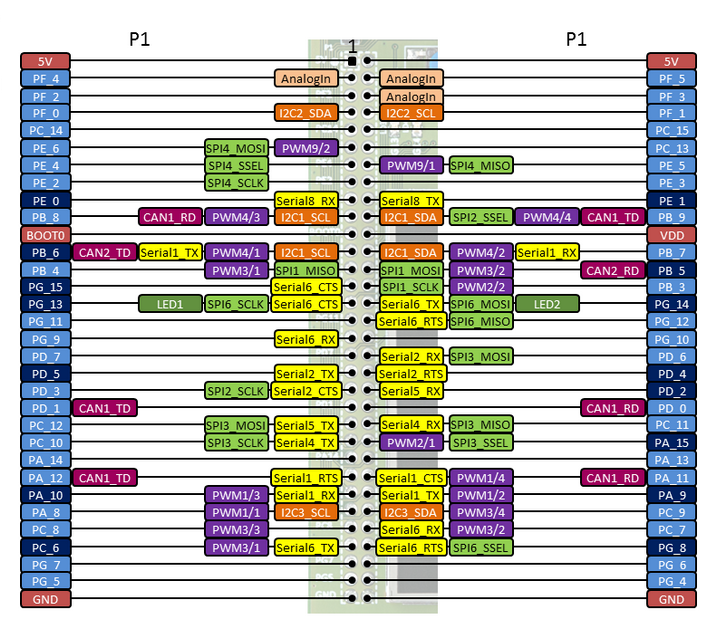
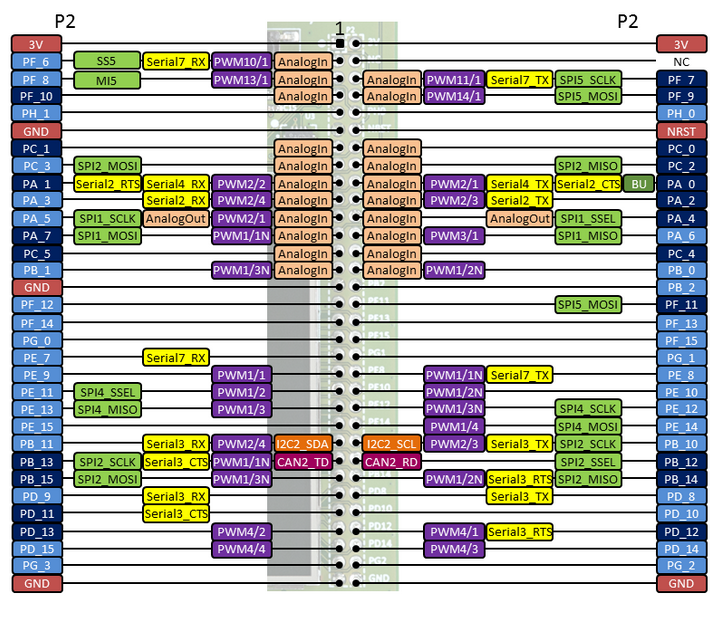
PB6 (TX) en PB12 (RX)
void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hcan->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspInit 0 */
/* USER CODE END CAN2_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB6 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN CAN2_MspInit 1 */
/* USER CODE END CAN2_MspInit 1 */
}
}